A baza ortonormala Se formează cu vectori perpendiculari între ei și al căror modul este și 1 (vectori unitari). Să ne amintim că o bază B într-un spațiu vectorial V, este definit ca un set de vectori liniar independenți capabili să genereze spațiul menționat.
La rândul său, un spațiu vector este o entitate matematică abstractă printre ale cărei elemente sunt vectori, în general asociați cu mărimi fizice precum viteza, forța și deplasarea sau, de asemenea, cu matrici, polinoame și funcții..

Vectorii au trei elemente distinctive: magnitudine sau modul, direcție și simț. O bază ortonormală este utilă în special pentru a le reprezenta și a le opera, deoarece orice vector care aparține unui anumit spațiu vectorial V, poate fi scris ca o combinație liniară a vectorilor care formează baza ortonormală.
În acest fel, operațiile dintre vectori sunt executate analitic, cum ar fi adunarea, scăderea și diferitele tipuri de produse definite în spațiul menționat..
Printre bazele cele mai utilizate în fizică se numără baza formată din vectori unitari eu, j Da k Ele reprezintă cele trei direcții distinctive ale spațiului tridimensional: înălțime, lățime și adâncime. Acești vectori sunt, de asemenea, cunoscuți ca vectori unitari canonici.
Dacă în schimb vectorii sunt lucrați într-un plan, două dintre aceste trei componente ar fi suficiente, în timp ce pentru vectorii unidimensionali este necesară doar una.
Indice articol
1- O bază B este cel mai mic set posibil de vectori care generează spațiul vectorial V.
2- Elementele B sunt liniar independenți.
3- Orice bază B a unui spațiu vectorial V, permite exprimarea tuturor vectorilor de V ca o combinație liniară a acesteia și această formă este unică pentru fiecare vector. Prin urmare să B este, de asemenea, cunoscut sub numele de sistem generator.
4- Același spațiu vectorial V poate avea baze diferite.
Iată câteva exemple de baze ortonormale și baze în general:
Numită și bază naturală sau bază standard a ℜ n, unde ℜ n este spațiul n-dimensional, de exemplu spațiul tridimensional este ℜ 3. La valoarea de n Se numeste dimensiune a spațiului vectorial și se notează ca slab (V).
Toți vectorii aparținând lui ℜ n sunt reprezentate de n-adas ordonat. Pentru spațiu ℜn, baza canonică este:
și1 = <1,0,… ,0>; șiDouă = <0,1,… ,0>; ... șin = <0,0,… ,1>
În acest exemplu, am folosit notația cu paranteze sau „paranteze” și bold pentru vectorii unitari și1, șiDouă, și3...
Vectorii familiari eu, j Da k admite aceeași reprezentare și toate trei sunt suficiente pentru a reprezenta vectorii din ℜ 3:
eu = <1,0,0 >; j = <0,1,0 >; k = <0,0,1 >
Înseamnă că baza poate fi exprimată astfel:
B = <1,0,0 >; <0,1,0 >; <0,0,1 >
Pentru a verifica dacă sunt liniar independenți, determinantul format cu ei este diferit de zero și egal cu 1:
F = <4,-7,0 > N = 4eu -7j + 0k N.
Prin urmare eu, j Da k alcătuiește un sistem generator de ℜ 3.
Baza standard descrisă în secțiunea anterioară nu este singura bază ortonormală din ℜ3. Aici avem de exemplu bazele:
B1 =
BDouă = <3/5, 4/5,0 >; <- 4/5, 3/5,0 >; <0,0,1 >
Se poate arăta că aceste baze sunt ortonormale, pentru aceasta ne amintim condițiile care trebuie îndeplinite:
-Vectorii care formează baza trebuie să fie ortogonali între ei.
-Fiecare dintre ele trebuie să fie unitar.
O putem verifica știind că determinantul format de ei trebuie să fie diferit de zero și egal cu 1.
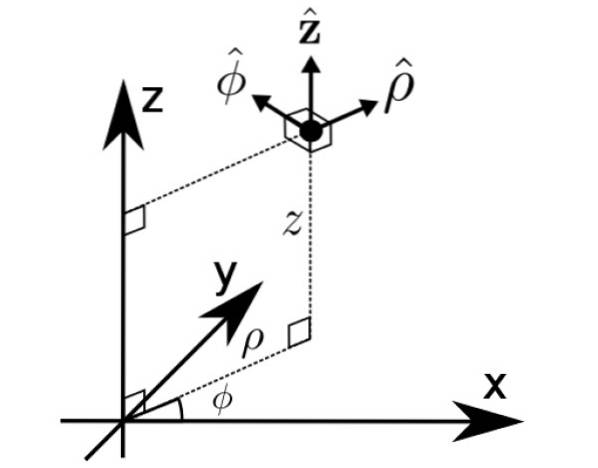
Baza B1 este exact aceea a coordonatelor cilindrice ρ, φ și z, un alt mod de exprimare a vectorilor în spațiu.
Arată că baza B = <3/5, 4/5,0 >; <- 4/5, 3/5,0 >; <0,0,1 > este ortonormal.
Pentru a arăta că vectorii sunt perpendiculari unul pe celălalt, vom folosi produsul scalar, numit și produsul intern sau punct al a doi vectori.
Fie oricare doi vectori sau Da v, produsul său dot este definit de:
sau • v = u.v. cosθ
Pentru a distinge vectorii modulelor lor vom folosi bold pentru primele și litere normale pentru al doilea. θ este unghiul dintre sau Da v, prin urmare, dacă sunt perpendiculare, înseamnă că θ = 90º și produsul scalar este zero.
Alternativ, dacă vectorii sunt dați în termeni de componente: sau =
sau • v = sauX .vX + sauDa .vDa + sauz .vz
În acest fel, produsele scalare dintre fiecare pereche de vectori sunt, respectiv:
i) <3/5, 4/5,0 > • <- 4/5, 3/5,0 > = (3/5). (- 4/5) + (4/5). ((3/5) + 0,0 = (-12/25) + (12/25) = 0
ii) <3/5, 4/5,0 > • <0, 0,1 > = 0
iii) <- 4/5, 3/5,0 > • <0, 0,1 > = 0
Pentru a doua condiție, se calculează modulul fiecărui vector, care se obține prin:
│u │ = √ (uXDouă + sauDaDouă + sauzDouă)
Astfel, modulele fiecărui vector sunt:
│<3/5, 4/5,0 >│ = √ [(3/5)Două + (4/5)Două + 0Două)] = √ [(9/25) + (16/25)] = √ (25/25) = 1
│<-4/5, 3/5,0 >│ = √ [(-4/5)Două + (3/5)Două + 0Două)] = √ [(16/25) + (9/25)] = √ (25/25) = 1
│<0, 0,1 >│ = √ [0Două + 0Două + 1Două)] = 1
Prin urmare, toți trei sunt vectori unitari. În cele din urmă, determinantul pe care îl formează este diferit de zero și egal cu 1:

Scrieți coordonatele vectorului w = <2, 3,1 > în ceea ce privește vechea bază.
Pentru a face acest lucru, se folosește următoarea teoremă:
Fie B = v1, vDouă, v3,... vn o bază ortonormală în spațiul V cu produs interior, vectorul w este reprezentat de B după cum urmează:
w = <w•v1> v1 + <w•vDouă> vDouă +<w•v3> v3 +... <w•vn> vn
Aceasta înseamnă că putem scrie vectorul în baza B, folosind coeficienții <w•v1>, <w•vDouă>, ... <w•vn>, pentru care trebuie calculate produsele scalare indicate:
<2, 3,1 > • <3/5, 4/5,0 > = (2). (3/5) + (3). (4/5) + 1.0 = (6/5) + (12/5) = 18/5
<2, 3,1 > • <- 4/5, 3/5,0 > = (2). (- 4/5) + (3). (3/5) + 1,0 = (-8/5) + (9/5) = 1/5
<2, 3,1 > • <0,0,1> = 1
Cu produsele scalare obținute se construiește o matrice, numită matrice de coordonate de w.
Prin urmare, coordonatele vectorului w în baza B sunt exprimate prin:
[w]B= [(5/18); (1/5); 1]
Matricea de coordonate nu este vectorul, deoarece un vector Nu este la fel ca și coordonatele sale. Acestea sunt doar un set de numere care servesc la exprimarea vectorului într-o bază dată, nu vectorul ca atare. Depind și de baza selectată.
În cele din urmă, urmând teorema, vectorul w ar fi exprimat astfel:
w = (18/5) v1 + (1/5) vDouă + v3
Cu: v1 = <3/5, 4/5,0 >; vDouă = <- 4/5, 3/5,0 >; v3 = <0,0,1 >, adică vectorii bazei B.



Nimeni nu a comentat acest articol încă.