vectori coplanari sau coplanare sunt cele care sunt conținute pe același plan. Când există doar doi vectori, aceștia sunt întotdeauna coplanari, deoarece există planuri infinite, este întotdeauna posibil să se aleagă unul care le conține.
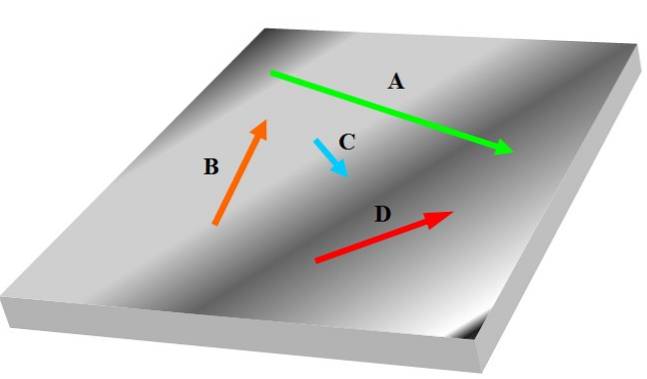
Dacă aveți trei sau mai mulți vectori, este posibil ca unii dintre ei să nu fie în același plan cu ceilalți, prin urmare nu ar putea fi considerați coplanari. Figura următoare prezintă un set de vectori coplanari notați cu caractere aldine LA, B, C Da D:
Vectorii sunt legați de comportamentul și proprietățile mărimilor fizice relevante în știință și inginerie; de exemplu viteza, accelerația și forța.
O forță produce efecte diferite asupra unui obiect atunci când modul său de aplicare este variat, de exemplu prin schimbarea intensității, direcției și direcției. Chiar și schimbând doar unul dintre acești parametri, rezultatele sunt considerabil diferite..
În multe aplicații, atât în statică, cât și în dinamică, forțele care acționează asupra unui corp se află pe același plan, de aceea sunt considerate coplanare.
Indice articol
Pentru ca trei vectori să fie coplanari, aceștia trebuie să se afle pe același plan și acest lucru se întâmplă dacă îndeplinesc oricare dintre următoarele condiții:
-Vectorii sunt paraleli, prin urmare componentele lor sunt proporționale și liniar dependente.
-Produsul dvs. mixt este nul.
-Dacă aveți trei vectori și oricare dintre ei poate fi scris ca o combinație liniară a celorlalți doi, acești vectori sunt coplanari. De exemplu, un vector care rezultă din suma altor doi, cei trei sunt toți în același plan.
Alternativ, condiția de coplanaritate poate fi stabilită după cum urmează:
U V w sunt coplanare dacă există trei numere (scalare) α, β, γ astfel încât αsau + βv + γw = 0 cu (α, β, γ) altele decât (0, 0, 0)
Produsul mixt între vectori este definit de trei vectori sau, v Da w, rezultând un scalar care rezultă din efectuarea următoarei operații:
sau · (v X w) = sau · (v X w)
În primul rând, produsul încrucișat care este între paranteze se efectuează: v X w, al cărui rezultat este un vector normal (perpendicular) față de planul în care ambele v Ce w.
da sau este pe același plan ca v Da w, în mod natural produsul scalar (produs punct) dintre u și vectorul normal menționat trebuie să fie 0. În acest fel se verifică că cei trei vectori sunt coplanari (se află pe același plan).
Când produsul amestecat nu este zero, rezultatul său este egal cu volumul paralelipipedului care are vectorii sau, v Da w ca laturi adiacente.
Punctele forte concurente toate sunt aplicate la același punct. Dacă sunt și coplanari, pot fi înlocuiți cu unul singur, care se numește forță rezultantă și are același efect ca forțele originale.
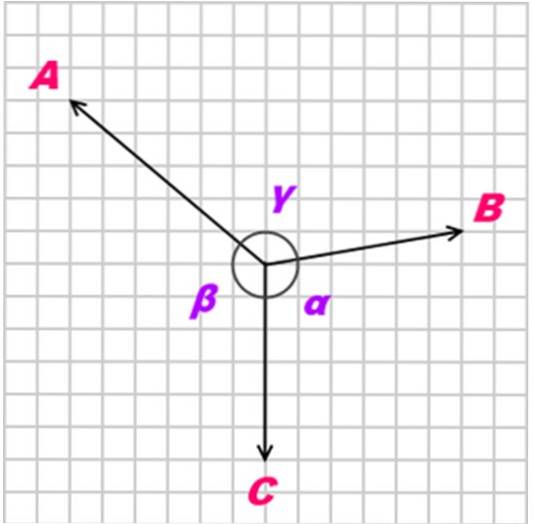
Dacă un corp este în echilibru datorită a trei forțe coplanare, simultane și nu coliniare (nu paralele), numite LA, B Da C, Teorema lui Lamy subliniază că relația dintre aceste forțe (magnitudini) este următoarea:
A / sin α = B / sin β = C / sin γ
Cu α, β și γ ca unghiuri opuse forțelor aplicate, așa cum se arată în figura următoare:
Găsiți valoarea lui k astfel încât următorii vectori să fie coplanari:
sau = <-3, k, 2>
v = <4, 1, 0>
w = <-1, 2, -1>
Deoarece avem componentele vectorilor, se utilizează criteriul produsului mixt, prin urmare:
sau · (v X w) = 0
Mai întâi se rezolvă v X w. Vectorii vor fi exprimați în termeni ai vectorilor unitari eu, j Da k care disting cele trei direcții perpendiculare în spațiu (lățime, înălțime și adâncime):
v= 4 eu + j + 0 k
w= -1 eu + Douăj -1 k
v X w = -4 (i x i) + 8 (i x j) - 4 (i x k) - (j x i) + Două (j x j) - Două (j x k) = 8 k + 4 j + k -Două i = -Două eu + 4 j + 9 k
Acum considerăm produsul scalar dintre u și vectorul care a rezultat din operația anterioară, setând operația egală cu 0:
sau (v X w) = (-3 eu + k j + Două k) · (-Două eu + 4 j + 9 k) = 6 + 4k +18 = 0
24 + 4k = 0
Valoarea căutată este: k = - 6
Deci vectorul sau este:
sau = <-3, -6, 2>
Figura arată un obiect a cărui greutate este W = 600 N, atârnat în echilibru grație cablurilor plasate la unghiurile prezentate în figura 3. Este posibil să se aplice teorema lui Lamy în această situație? În orice caz, găsiți magnitudinile T1, TDouă Da T3 care fac posibil echilibrul.
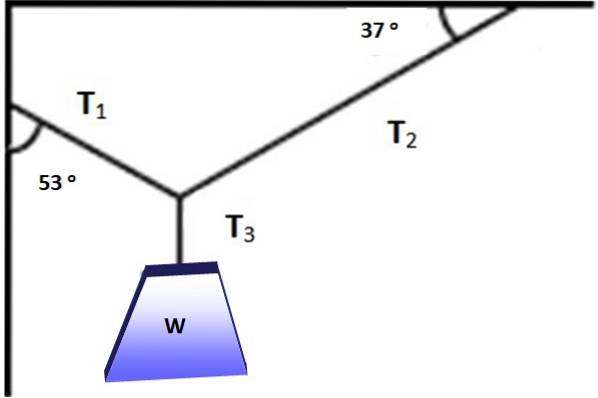
Teorema lui Lamy este aplicabilă în această situație dacă se ia în considerare nodul pe care sunt aplicate cele trei tensiuni, deoarece acestea constituie un sistem de forțe coplanare. În primul rând, se realizează diagrama corpului liber pentru greutatea suspendată, pentru a determina magnitudinea T3:
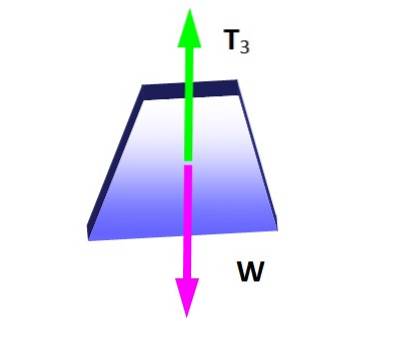
Din condiția de echilibru rezultă că:
T3 = W = 600 N
Unghiurile dintre forțe sunt marcate cu roșu în figura următoare, se poate verifica cu ușurință că suma lor este de 360 °. Acum este posibil să se aplice teorema lui Lamy, deoarece una dintre forțe și cele trei unghiuri dintre ele sunt cunoscute:
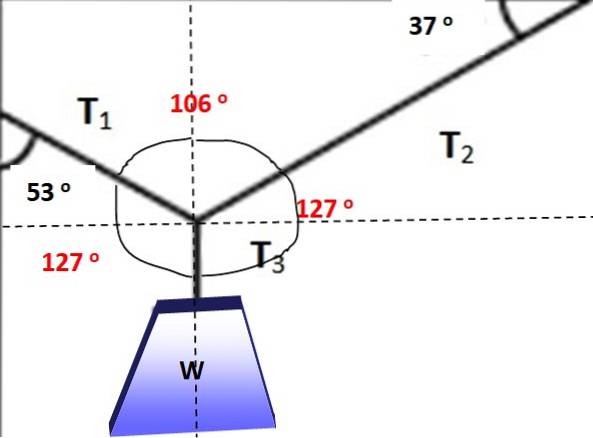
T1 / sin 127º = W / sin 106º
Prin urmare: T1 = sin 127º (W / sin 106º) = 498,5 N
Din nou, teorema lui Lamy este aplicată pentru a rezolva TDouă:
TDouă / sin 127 = T1 / păcat 127º
TDouă = T1 = 498,5 N



Nimeni nu a comentat acest articol încă.