
regula mâinii drepte este o resursă mnemonică pentru a stabili direcția și sensul vectorului rezultat dintr-un produs vector sau un produs încrucișat. Este utilizat pe scară largă în fizică, deoarece există cantități importante de vectori care sunt rezultatul unui produs vector. Acesta este cazul cuplului, forței magnetice, momentului unghiular și momentului magnetic, de exemplu.
Fie doi vectori generici la Da b al cărui produs încrucișat este la X b. Modulul unui astfel de vector este:
la X b = a.b. în α
Unde α este unghiul minim dintre la Da b, în timp ce a și b reprezintă modulele sale. Pentru a distinge vectorii modulelor lor, se utilizează litere aldine.
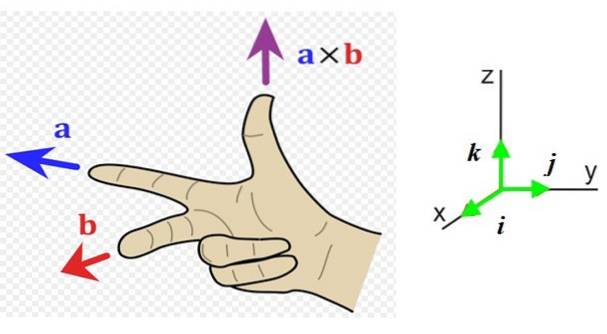
Acum trebuie să cunoaștem direcția și sensul acestui vector, deci este convenabil să avem un sistem de referință cu cele trei direcții ale spațiului (figura 1 dreapta). Vectorii unitari eu, j Da k îndreaptă spre cititor (în afara paginii), spre dreapta și în sus.
În exemplul din Figura 1 din stânga, vectorul la se îndreaptă spre stânga (direcția Da negativ și degetul arătător al mâinii drepte) și vectorul b merge la cititor (direcția X deget pozitiv, mijlociu al mâinii drepte).
Vectorul rezultat la X b are direcția degetului mare, sus în direcția z pozitiv.
Indice articol
Această regulă, numită și regula degetului mare drept, Se folosește foarte mult atunci când există magnitudini a căror direcție și direcție sunt rotative, cum ar fi câmpul magnetic B produs de un fir subțire și drept care transportă un curent.
În acest caz, liniile câmpului magnetic sunt cercuri concentrice cu firul, iar direcția de rotație se obține cu această regulă în felul următor: degetul mare drept indică direcția curentului și restul de patru degete sunt curbate în direcția peisajul rural. Ilustrăm conceptul din figura 2.
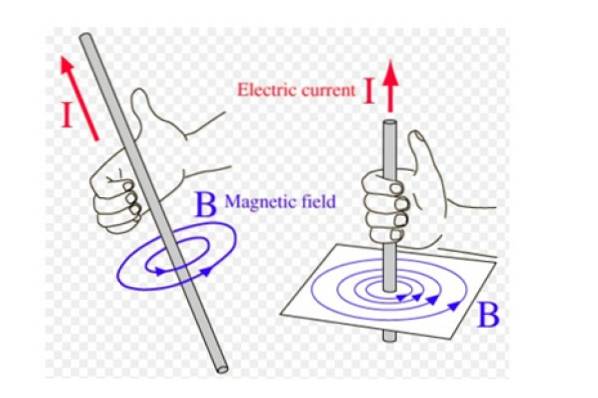
Figura de mai jos prezintă o formă alternativă a regulii de la dreapta. Vectorii care apar în ilustrație sunt:
-Viteză v a unei sarcini punctuale q.
-Camp magnetic B în interiorul căruia se mișcă sarcina.
-FB forța pe care câmpul magnetic o exercită asupra încărcăturii.
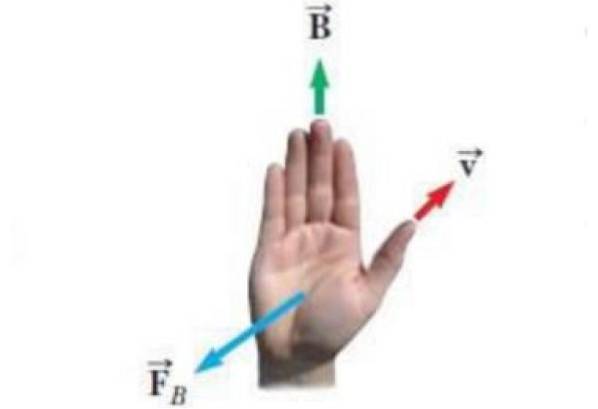
Ecuația pentru forța magnetică este FB = qv X B și regula mâinii drepte pentru a cunoaște direcția și sensul FB se aplică astfel: degetul mare arată în funcție de v, cele patru degete rămase sunt plasate în funcție de câmpul B. Apoi FB este un vector care iese din palma mâinii, perpendicular pe ea, ca și cum ar împinge sarcina.
Rețineți că FB Aș indica în direcția opusă dacă încărcarea q a fost negativă, întrucât produsul vector nu este comutativ. De fapt:
la X b = - b X la
Regula mâinii drepte poate fi aplicată pentru diferite mărimi fizice, să știm câteva dintre ele:
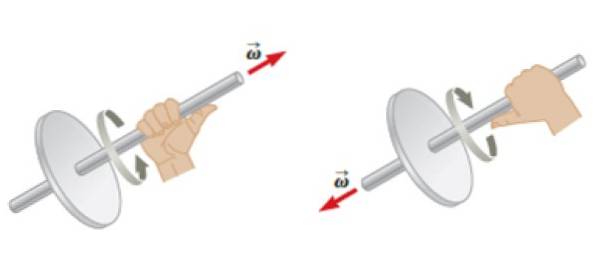
Ambele viteze unghiulare ω ca accelerație unghiulară α sunt vectori. Dacă un obiect se rotește în jurul unei axe fixe, este posibil să atribuiți direcția și sensul acestor vectori folosind regula mâinii drepte: cele patru degete sunt încovoiate urmând rotația, iar degetul mare oferă imediat direcția și sensul vitezei unghiulare ω.
La rândul său, accelerația unghiulară α va avea aceeași adresă ca ω, dar sensul său depinde dacă ω crește sau scade în magnitudine în timp. În primul caz, ambele au aceeași direcție și sens, dar în al doilea vor avea direcții opuse..
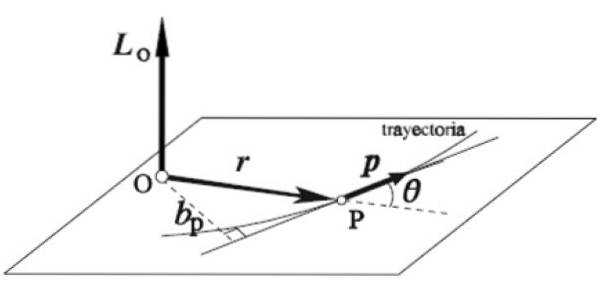
Vectorul momentului unghiular LSAU a unei particule care se rotește în jurul unei anumite axe O este definită ca produsul vector al vectorului său de poziție instantanee r și impulsul liniar p:
L = r X p
Regula mâinii drepte se aplică în acest fel: degetul arătător este plasat în aceeași direcție și sens de r, degetul mijlociu pe cel al p, ambele pe un plan orizontal, ca în figură. Degetul mare este automat extins vertical în sus, indicând direcția și sensul impulsului unghiular LSAU.
Vârful din figura 6 se rotește rapid cu viteza unghiulară ω iar axa sa de simetrie se rotește mai încet în jurul axei verticale z. Această mișcare se numește precesiune. Descrieți forțele care acționează asupra vârfului rotativ și efectul pe care îl produc.
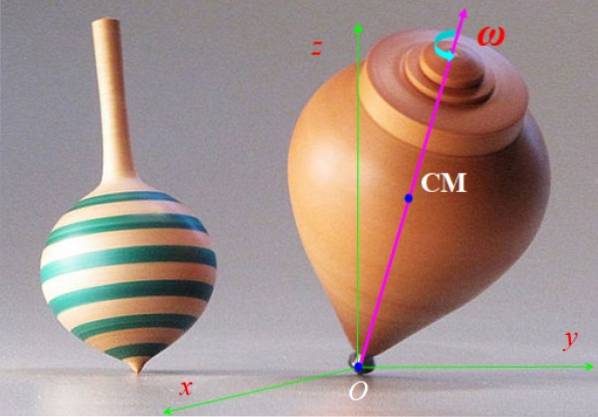
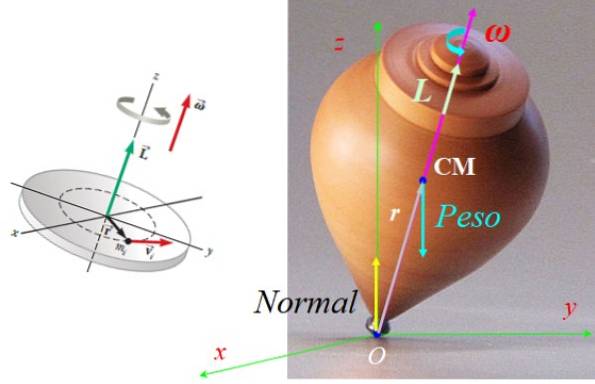
Forțele care acționează deasupra sunt normale N, aplicat pe punctul de sprijin cu solul O plus greutatea Mg, aplicat la centrul de masă CM, cu g vectorul de accelerație al gravitației, direcționat vertical în jos (a se vedea figura 7).
Ambele forțe se echilibrează, de aceea vârful nu se mișcă. Cu toate acestea, greutatea produce un cuplu sau un cuplu τ net cu privire la punctul O, dat de:
τSAU = rSAU X F, cu F = Mg.
Ce r si mg acestea sunt întotdeauna în același plan în care partea superioară se rotește, conform regulii mâinii drepte cuplul τSAU este întotdeauna situat în avion X y, perpendiculare pe amândouă r Ce g.
Rețineți că N nu produce un cuplu față de O, deoarece vectorul său r cu privire la O este nul. Acest cuplu produce o schimbare a impulsului unghiular care face ca vârful să preceadă în jurul axei Z..
Indicați direcția și sensul vectorului momentului unghiular L din partea de sus a figurii 6.
Orice punct de sus are masa meu, viteză veu și vectorul de poziție reu, când se rotește în jurul axei z. Impuls unghiular Leu a acestei particule este:
Leu = reu X peu = reu x meuveu
Având în vedere reu Da veu sunt perpendiculare, mărimea lui L este:
Leu = meureuveu
Viteza liniară v este legată de viteza unghiulară ω prin:
veu = reuω
Prin urmare:
Leu = meureu (reuω) = meureuDouăω
Momentul unghiular total al vârfului rotativ L este suma momentului unghiular al fiecărei particule:
L = (∑meureuDouă ) ω
∑ meureuDouă este momentul de inerție I al vârfului, atunci:
L= Euω
Prin urmare L Da ω au aceeași direcție și sens, așa cum se arată în figura 7.



Nimeni nu a comentat acest articol încă.