suma vectorială este operația de adunare între vectori care are ca rezultat un alt vector. Vectorii se caracterizează prin magnitudine, precum și direcție și simț. Prin urmare, nu este posibil, în general, să le adăugați așa cum s-ar face cu cantități scalare, adică prin adăugarea de numere.
Se numește vectorul obținut din suma mai multor vectori vector rezultat. În Mecanică vorbesc despre forță rezultantă, care este suma vectorială a tuturor forțelor pe un corp. Acest rezultat este echivalent cu setul sau sistemul de forțe.
Pentru a specifica pe deplin vectorul sumă este necesar să se indice magnitudinea și unitatea, direcția și sensul.
Este important de reținut că atunci când se adaugă vectori, aceștia trebuie să reprezinte aceeași magnitudine fizică, prin urmare suma vectorială este o operație omogenă. Aceasta înseamnă că putem adăuga o forță la alta, dar nu o forță cu o deplasare, deoarece rezultatul este lipsit de sens.
Sunt disponibile mai multe metode pentru a găsi vectorul rezultat: grafic și analitic. Pentru a găsi sume vectoriale cu metode grafice, pornim de la o reprezentare simplă pentru un vector, și anume un segment orientat sau o săgeată ca aceasta:

Vectorii sunt notați cu litere îngroșate în textul tipărit sau printr-o săgeată deasupra literei, pentru a le distinge de mărimile sau cantitățile lor scalare respective. De exemplu, magnitudinea vectorului v Este pur și simplu v.
Indice articol
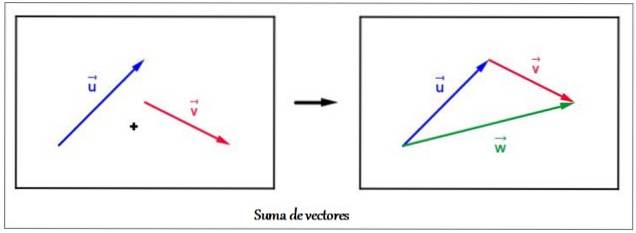
Pentru a adăuga mai mult de doi vectori coplanari, metoda poligonului sau metoda traversă, care constă în a se traduce paralel cu fiecare dintre vectorii addend. O caracteristică a vectorilor este că sunt invarianți față de traducere, prin urmare vom folosi această proprietate pentru a stabili suma.
Începem cu oricare dintre vectori, deoarece adunarea vectorială este comutativă și ordinea adunărilor nu modifică suma. Al doilea vector este tradus în continuare, potrivindu-și originea cu sfârșitul primului.
Apoi este adus la următorul vector și este plasat în continuare, urmând aceeași procedură, care este aceea de a potrivi originea cu sfârșitul celui precedent. Procedați în acest mod până când este poziționat ultimul vector.
Vectorul rezultat este cel care unește originea primului cu capătul liber al ultimului. Denumirea acestei metode provine din figura rezultată: un poligon.
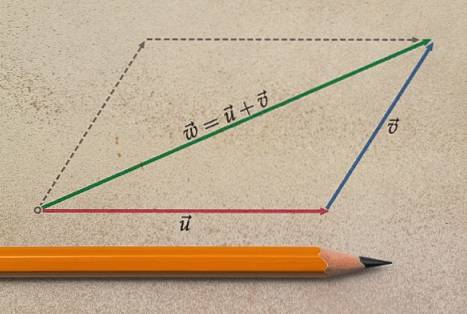
Să luăm ca exemplu suma a doi vectori sau Da v prezentată în figura de mai sus.
Începând cu vectorul sau, mutat în vector v pentru a-și potrivi originea cu sfârșitul primului. Vectorul rezultat w este extras din originea sau până la sfârșitul anului v, formând o figură cu trei fețe: un triunghi. De aceea, în acest caz special, se numește procedura metoda triunghiului.
Rețineți un detaliu important, magnitudinea sau modulul vectorului rezultat nu este suma modulelor vectorilor adăugați. De fapt, este aproape întotdeauna mai puțin, cu excepția cazului în care vectorii sunt paraleli..
Să vedem ce se întâmplă în acest caz mai jos.
Metoda descrisă poate fi aplicată și cazului special în care vectorii sunt paraleli. Să luăm în considerare următorul exemplu:

Este lăsat la îndemâna vectorului v în poziția sa originală și este tradus în vector sau în așa fel încât originea sa să fie de acord cu sfârșitul anului v. Acum se desenează un vector pornind de la originea lui v și se termină la sfârșitul anului sau.
Acesta este vectorul rezultat w iar dimensiunea sa este suma mărimilor suplimentelor. Direcția și sensul celor trei vectori este același.
Vectorul rezultat are un modul maxim dacă adunările formează un unghi de 0º între ele, ca în exemplu. Dacă vectorii formează un unghi de 180º între ei, atunci vectorul rezultat are modul minim.
Un ciclist parcurge mai întâi 3 km în direcția nord și apoi 4 km vest. Deplasarea ta, pe care o numim R, se găsește ușor cu metoda triunghiului plus un cadru de referință, unde punctele cardinale sunt marcate:
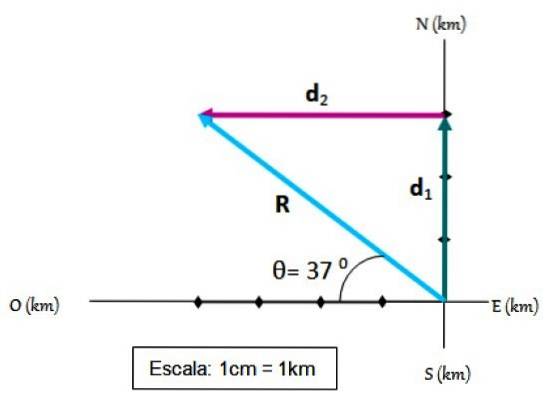
-Punctul de plecare este făcut să coincidă cu originea sistemului de referință.
-Pe axele de coordonate, se alege o scară, care în acest caz este de 1 cm = 1 km
-Prima deplasare este trasă la scară d1.
-Apoi la d1 se trasează al doilea offset dDouă, de asemenea la scară.
-Deplasarea rezultată R este un vector care merge de la origine până la sfârșitul anului dDouă.
-Mărimea la R se măsoară cu o riglă gradată, este ușor să verificați dacă R = 5.
-În cele din urmă unghiul care R forma cu orizontală se măsoară cu ajutorul unui transportor și se dovedește a fi θ = 37 0
Un înotător dorește să traverseze un râu și pentru aceasta înoată la o viteză de 6 km / h, perpendicular pe țărm, dar un curent care poartă o viteză de 4 km / h îl deviază.
Pentru a cunoaște viteza rezultată, se adaugă vectorii de viteză ai înotătorului, care a fost tras vertical, și ai curentului, care este prezentat orizontal..
Urmând metoda grafică se obține viteza rezultată vR:
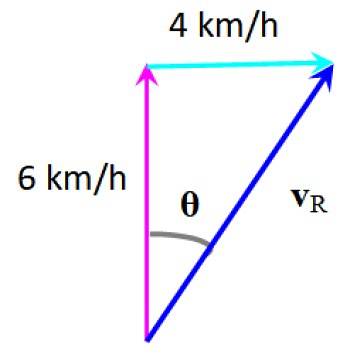
Devierea experimentată de înotător poate fi calculată prin:
θ = arctg (4/6) = 33,7º la dreapta direcției sale inițiale
Magnitudinea vitezei sale este crescută datorită faptului că viteza râului este adăugată vectorial. Poate fi găsit setând cu atenție o scală, ca în exemplul de mai sus.
Sau cu ajutorul raporturilor trigonometrice de 33,7º:
păcat 33.7º = 4 / vR
vR = 4 / sin 33,7º = 7,21 km / h
Următoarele forțe acționează asupra unei particule, ale cărei magnitudini sunt enumerate mai jos:
F1= 2,5 N; FDouă= 3 N; F3= 4 N; F4= 2,5 N
Găsiți forța rezultată.
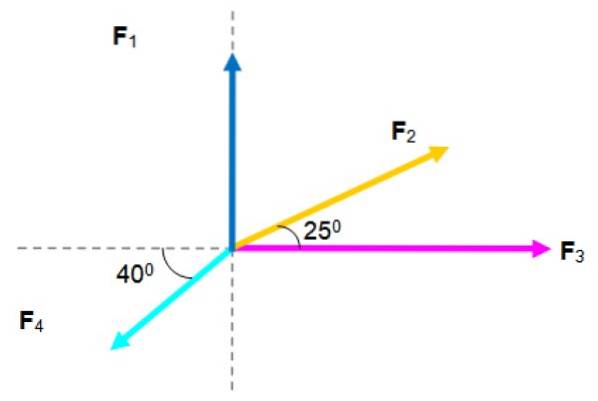
Putem adăuga grafic începând cu oricare dintre vectori, deoarece suma vectorială este comutativă.
În figura A am început cu F1. Stabilind o scală și cu ajutorul unei rigle și a unui pătrat, ceilalți vectori sunt transferați pentru a le plasa unul după altul..
Vectorul FR este îndreptată de la originea F1 până la sfârșitul anului F4. Magnitudinea sa este de 5,2 N și formează un unghi de 26,5 ° față de orizontală.
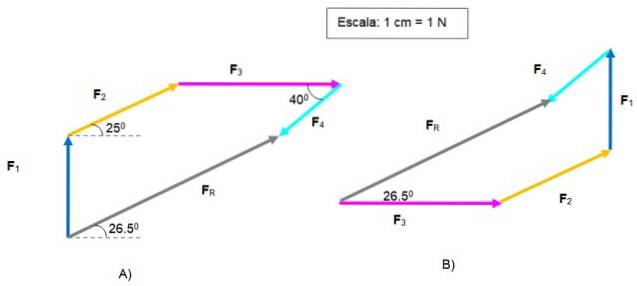
În figura B, aceeași problemă a fost rezolvată, începând cu F3 și terminând cu F4, a ajunge egal FR .
Poligoanele sunt diferite, dar rezultatul este același. Cititorul poate face testul schimbând din nou ordinea vectorilor.


Nimeni nu a comentat acest articol încă.